
食品収穫用のロボットグリッパー開発・製造支援
SoftGrip Project (Horizon2020/EU主催)
ロボットグリッパーとは
ロボットグリッパーとは、ロボットハンドの先端に取り付けられ使用されるエンドエフェクタの一種です。
グリッパーは爪と呼ばれる人間の手指のような物で「つかむ」「はなす」などの動作をします。
爪の開閉は主に空気圧またはモーターを駆動源としています。空気圧用のグリッパーは価格が比較的安価ですが、モーター用に比べ把持力や速度の微調整が困難です。モーター用は把持力や速度制御、位置制御がしやすい利点があります。
ロボットグリッパーの活用分野

何か物をつかんで、運び、離すという作業は、産業界のみならず、食品業界や農業など、さまざまな分野で必要な動作です。この作業をロボットグリッパーが代行することで、多くの工数削減が図れます。
しかし、ただつかむだけでも、物を認識し、ロボットグリッパーの位置を制御し、つかむ速度や力を調整するなど、さまざまなセンシングや制御の技術が必要となります。また、対象物に応じてグリッパーの形状や材質を決めたり、センサーやアクチュエーターの仕様を決める必要があります。
特に、食品業界で扱う野菜やお菓子などの柔らかい物体に関しては、その個体に傷をつけないよう柔軟につかむための制御や機構の設計が求められます。また、野菜のように個体に応じて大きさが違うような物体は、画像認識による対象物の大きさの把握が必要です。
ロボットグリッパーが求められる背景
生鮮食品業は非常に労働集約的な業界で、製造コストの半分以上を人件費が占めることも多くあります。マッシュルームやイチゴ、桃などのデリケートな青果物の収穫は、熟練を要する複雑な作業であるため、これまでロボットによる自動化が実現できていませんでした。
ホワイトマッシュルームは世界で最も広く栽培されているマッシュルームであり、マッシュルーム市場全体の15〜36%を占めています。ホワイトマッシュルームの60%は生鮮品(フレッシュマッシュルーム)として出荷され、残りは加工品や缶詰として出荷されます。缶詰用マッシュルームの収穫は自動化されていますが、高い品質基準が求められるフレッシュマッシュルームの自動収穫システムは未だ存在せず、収穫は手作業で行われています。
マッシュルームを傷付けず収穫するためには、繊細で正確な作業が必要で、作業者の技巧に依存していることが原因です。一方、低くて奥まったマッシュルーム生育棚や、高湿度の生育環境のため、マッシュルーム収穫は農作業の中でも特に肉体的に厳しいものであり、体調を崩して休む作業者も多く、作業者・雇用者の双方に不利益が生じているのが現状です。
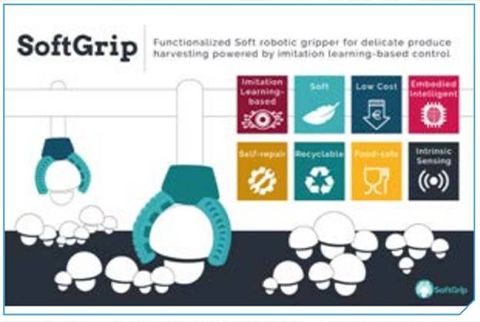
SoftGripプロジェクトは、デリケートなホワイトマッシュルームを自動的に収穫するための柔軟なロボットグリッパーを開発します。リサイクル可能な素材、高度な製造技術を用いて、アクチュエーターや触覚センサを内蔵した精密で低価格のソフトロボットグリッパー開発を目指しています。
リアルタイムのモデルベースコントロールと、ソフトグリッパーの高度な学習能力を向上させるため、高速計算モデリングアルゴリズムも開発します。当プロジェクトでは、ロボットが実際の作業者を手本としてマッシュルーム収穫スキルを習得し、そのスキルを他の類似作業にも応用するといった実践学習体制の開発を目指しています。
 マッシュルーム収穫作業。
マッシュルーム収穫作業。高湿な環境での重労働が課題となっています。
 マッシュルーム収穫用ロボット グリッパーのイメージ。
マッシュルーム収穫用ロボット グリッパーのイメージ。
軟質樹脂素材の開発と注型を実現するための加工技術
三井化学グループの力を結集し、ゲルをはじめとする軟質樹脂素材の開発を行うとともに、軟質樹脂を用いた注型を実現するための加工技術を提供しました。また、MEMSセンサに関する弊社知見においても、マッシュルーム収穫ロボットの開発に貢献しております。
樹脂部品の材料設計
マッシュルームを傷めない柔軟性と、マッシュルームを把持できる強度を併せ持った樹脂を選定
樹脂部品の構造設計
・試作品を用いた実験を行い、空気圧に耐えられる指の形状を提案
・試作品をパートナーに評価してもらい、フィードバックに基づいて、
より適切な設計と成形方法を検討
Horizon2020 Soft Robotic Gripper Projectとは
Horizon Europeは、世界的な課題に対する研究開発の推進を目的とするEU主催の主要プログラムです。
Horizon Europeは2020年、マッシュルーム収穫を自動化するロボットの開発を行う“Soft Robotic Gripper Project”を採択しました。このプロジェクトにはイタリアの大学 Sant‘Anna School of Advanced Studies(SSSA)を始め、ギリシャの大学 Institute of Communications and Computer Systems(ICCS)、イギリスの大学 The University of Essex(UESS)、ギリシャの研究機関TWI Hellas(THL)アイルランドの農業および食物開発機関 Agriculture and Food Development Authority(TEAGASC)、三井化学株式会社の6組織が参画しております。
マッシュルームの画像認識、マッシュルーム収穫時の人の手の動きや把持力のAI学習を始めとし、ロボットハンドや収穫システムの開発を共同で行っています。三井化学はマッシュルーム収穫ロボットの指部分の開発に従事し、SSSAと協業で、低硬度素材の開発力を生かし、小型センサを内蔵した空気圧駆動の柔らかい指を開発しております。
 Soft Robotic Gripper プロジェクトのHP
Soft Robotic Gripper プロジェクトのHP
 Soft Robotic Gripper Project キックオフミーティング(オンライン)の様子
Soft Robotic Gripper Project キックオフミーティング(オンライン)の様子
三井化学のロボット開発ソリューション
三井化学では、材料開発・選定、設計開発、部品加工、評価/分析といったロボット開発に必要なソリューションをワンストップで提供しております。
ロボット開発において抱えている技術課題に対し、これまでに培った樹脂素材の豊富な知見を活かし解決します。